Ortofotomapy z drona

Co to jest ortofotomapa – definicja i cechy
Według definicji, ortofotomapa jest “mapą fotograficzną powstałą w wyniku przetwarzania różniczkowego zdjęcia lotniczego”. Taka definicja może być ciężka do strawienia, więc przyjrzymy się zagadnieniu bliżej.
Czym się różni ortofotomapa od zdjęcia lotniczego?
Najczęściej, ortofotomapy powstają w wyniku przetwarzania zdjęć satelitarnych, lotniczych lub z drona. Główną różnicą jest zmiana rzutu (perspektywy) z rzutu środkowego do rzutu ortogonalnego. Ortogonalnego, czyli inaczej prostopadłego do fotografowanej płaszczyzny.
Stąd też nazwa: “orto” – od rzutu ortogonalnego, “foto” – od fotografii, “mapa” – bo finalny produkt może być wykorzystywany do tych samych celów co mapa oraz posiada niektóre z jej cech – skalę, układ współrzędnych i zachowane proporcje i może służyć do wykonywania pomiarów.
Rzut środkowy (gdzie “środkiem” jest jeden punkt – matryca aparatu) powoduje pozorne zakrzywienie przestrzeni i nierównomierność skali. Im większy fotografowany obszar, różnice terenu i krótsza ogniskowa (szerszy kąt widzenia obiektywu), tym zniekształcenia są większe.
Ekstremalny przypadek można zaobserwować z obiektywem typu rybie oko, gdzie celowo nie koryguje się dystorsji.
W rzucie ortogonalnym, każdy punkt badanej płaszczyzny fotografowany jest prostopadle, pionowo z góry. By to uzyskać, ortofotomapy tworzy się wykonując setki zdjęć badanego obszaru, a następnie łączy w procesie ortorektyfikacji i mozaikowania.
Wierna ortofotomapa – true orthophoto
Obiekty wystające ponad/poniżej powierzchni ortofotomapy mogą ulec zakrzywieniu lub lekkiemu przesunięciu – w ich wypadku nie będzie zachowana skala. Mogą też przesłonić inne obiekty znajdujące się za nimi.
Wykorzystanie dronów i zebranie zdjęć o dużym pokrywaniu pozwala połączyć fotografie tak, by kontury budynków (lub innych wysokich elementów) zostały zrzutowane dokładnie na swoje podstawy. W takim przypadku mówimy o “wiernej ortofotomapie” (ang. true orthophoto).
Dokładność ortofotomapy – GSD
Dokładność i szczegółowość ortofotomapy zależy głównie od jej rozdzielczości – terenowego rozmiaru pixela, z angielskiego Ground Sampling Distance (GSD).
- GSD rzędu 30cm/px pozwala na identyfikację elementów przestrzeni – zabudowań, dróg, itp.
- GSD rzędu 10cm/px pozwala na dokładniejszą inspekcję obszarów zurbanizowanych – rozróżnienie pasów drogowych, płyt chodnikowych, instalacji naziemnych, granic budynków i działek,
- GSD rzędu 5cm/px jest już bardzo szczegółową dokładnością i pozwala na inspekcje dachów, rynien i dachówek, pomiary odległości i objętości, rozróżnianie pojedynczych osób, itp.
- GSD rzędu 1cm/px cechuje najdokładniejsze ortofotomapy, na których można opierać prace zgłaszane do ODGiK.
Takie rozdzielczości są dużo dokładniejsze niż te, które spotykane są w tradycyjnej fotogrametrii. Dostarczone w ten sposób informacje i pomiary pozwalają (częściowo lub w całości) zrezygnować z dalszych pomiarów geodezyjnych.
Ortofotomapy – zastosowanie
Ortofotomapy stosuje się wszędzie tam, gdzie potrzebne jest precyzyjne i dokładne odwzorowanie terenu (na potrzeby pomiarów lub wizualizacji). Choć zastosowań jest całe spektrum, to zdają się dominować dwa główne nurty – mapy na potrzeby inżynierii lądowej oraz mapy wykorzystywane przy analizach środowiska.
Realizacja inwestycji i promocja
Cyfrowe mapy mogą być pomocne na każdym etapie realizacji inwestycji budowlanej lub infrastrukturalnej. Od prezentacji terenu i wizualizacji planów zagospodarowania przed inwestorami, przez inwentaryzację wydzielonych działek, sprzedaż terenu po promocję zakończonej inwestycji.
W ramach takiej promocji można zrealizować kampanie marketingowe przedstawiające dane miejsce lub obiekt. Stworzyć wizualizację terenu np. w ośrodkach turystycznych, narciarskich i zaprezentować dostępne trasy, szlaki, punkty widokowe.
Inżynieria lądowa – planowanie prac budowlanych
Ortofotomapy z dronów używane są podczas projektowania i realizacji prac budowlanych. Postępujące prace monitoruje się bez konieczności ich zatrzymania. Kolejne etapy budowy poddaje się cyklicznej ocenie. Po zakończeniu budowy dokonuje się inwentaryzacji powykonawczej, np. poprzez zestawienie wykonanej pracy z planami i zamówieniem.
Mapy terenu wykorzystuje się również podczas planowania, budowy i inwentaryzacji infrastruktury, takiej jak drogi, linie kolejowe, linie przemysłowe, linie energetyczne, gazociągi.
Inwentaryzacje wyrobisk, składowisk
W przypadku obiektów takich jak wyrobiska, składowiska, magazyny czy kopalnie odkrywkowe, tworzy się modele 3D tych obszarów przemysłowych. Wykorzystywane są one do pomiarów, planowania i monitoringu. Mierzy się objętość urobku, składowanych materiałów takich jak kruszywa i stanów magazynowych. Porównuje się wielkość (kubaturę) dostarczanych materiałów sypkich i zgodność dostaw z zamówieniami. Mierzy się objętość mas ziemnych i szacuje koszt oraz czas wywozu np. z planu budowy.
W ten sposób bada się również szybkość przyrastania wysypisk śmieci, złomowisk, itp.

Ewidencja gruntów i budynków
Na potrzeby ewidencji gruntów i budynków, cyfrowe ortomapy wykorzystuje się do wyznaczania granic działek i pomiarów ich powierzchni oraz odległości w przestrzeni.
Referencje do innych map
W ten sposób dokonuje się również aktualizacji starszych, istniejących już map lub porównuje mapy różnego typu (w ten sposób można wykryć samowole budowlane lub nielegalne wysypiska odpadów).
Na mapę rastrową (fotomapę) można nanieść mapę wektorową, np. dróg, zabudowań, linii energetycznych.
Można również stworzyć mapę termowizyjną CIR (Color-InfraRed), czyli mapę wykonaną ze zdjęć w podczerwieni. Takie mapy służą do badania np. stanu roślin, drzewostanu, wilgotności gleby, wykrywania rurociągów podziemnych.
Nadzorowanie zmian terenowych
Cyklicznie tworzone mapy danego terenu pozwalają na monitorowanie i detekcję zmian w środowisku naturalnym. Monitorować można takie parametry jak występowanie osuwisk, poziom wód powierzchniowych czy rodzaj i gęstość występującej roślinności.
W zestawieniu ze zmianami w środowisku naturalnym, przedstawić można plany rozwoju sieci osadniczej (urbanizacji).

Analizy środowiskowe
Cyfrowe ortofotomapy w analizach środowiska pozwalają na monitorowanie stanu pól, lasów, rzek, jezior, gruntów, itp. W lasach służą do badania kondycji drzewostanów, wykrywania zniszczeń i uszkodzeń (złomów, wywrotów, pożarów), występowania szkodników czy monitorowania różnorodności biologicznej terenu.
Dokumentacja klęsk żywiołowych
W przypadku wystąpienia klęsk żywiołowych takich jak pożary, powodzie, podtopienia, susze możliwe jest badanie ich postępu oraz dokumentacja zakresu i rodzaju strat.

Rolnictwo precyzyjne
Drony z kamerami multispektralnymi wykorzystuje się także w rolnictwie. Taka ortofotomapa upraw pozwala na optymalizację nawożenia, weryfikację wzrostu polnów, inwentaryzację szkód, czy badanie melioracji gleby.
Poszukiwania archeologiczne
Zdarza się, że cyfrowe mapy terenu wykorzystuje się w tak nietypowych zastosowaniach jak poszukiwania archeologiczne, co byłoby trudne do wykonania z powierzchni ziemi.
Ortofotomapy cyfrowe z drona – planowanie nalotu fotogrametrycznego
W dużym uproszczeniu, za pomocą drona z kamerą wykonuje się setki zdjęć mapowanego terenu, które następnie poddaje się odpowiedniej obróbce i składa w jedną mapę.
Planowanie nalotu
Pierwszym krokiem jest zaplanowanie nalotu i dobranie odpowiednich parametrów. W zależności od celu mapowania, ustala się:
- rodzaj drona – płatowiec do obiektów liniowych (np. droga, rzeka) i dużych obszarów lub wielowirnikowiec do małych, lokalnych obszarów, jak pomiary na placu budowy,
- kamerę i rozdzielczość matrycy, w zależności od wymaganego rozmiaru piksela – GSD,
- wielkość pokrycia podłużnego i poprzecznego – sięgająca 80% dla precyzyjnych modeli terenu i wiernych ortofotomap.
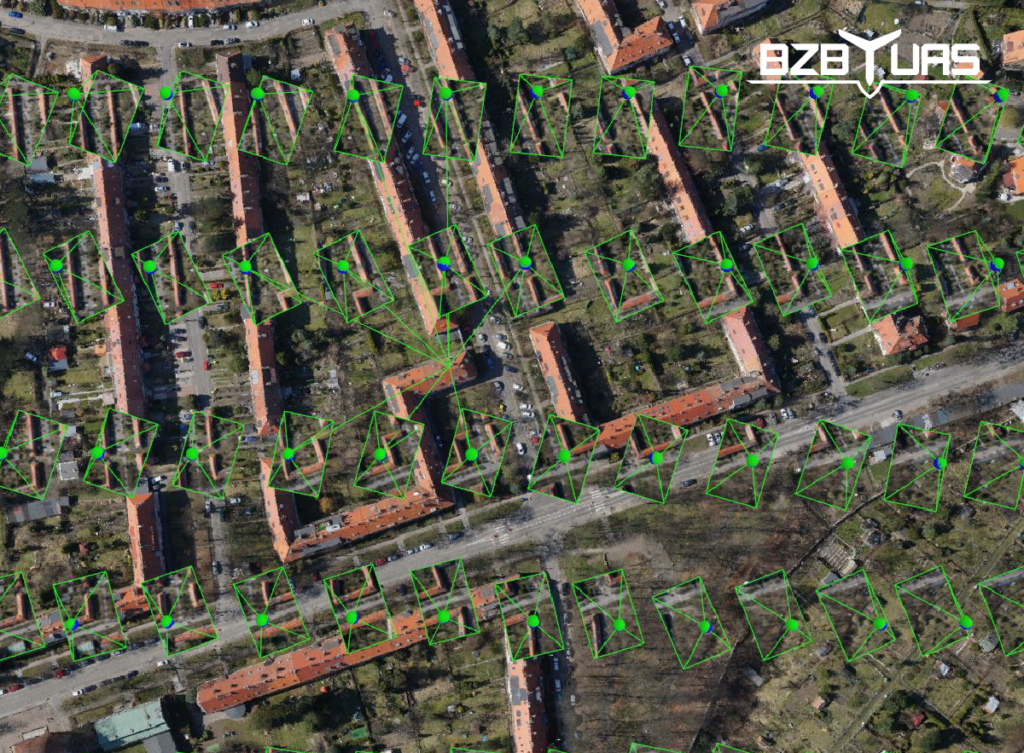
Fotopunkty
Następnie dobiera się osnowę fotogrametryczną. Jest to zbiór tzw. fotopunktów, czyli punktów, które można jednoznacznie zidentyfikować (wraz z ich koordynatami) zarówno na zdjęciach jak i w terenie. Mogą to być namalowane na gruncie specjalne znaki, lub naturalnie występujące punkty jak studzienki kanalizacyjne, centralne punkty ronda.

Wykonanie nalotu
Nalot planuje się w specjalnym programie, który kontroluje parametry samolotu i steruje nim podczas lotu. Na tym etapie pozyskiwane są setki zdjęć wraz z danymi o geopozycji (GPS) oraz o orientacji kamery w przestrzeni – tzw. elementami orientacji zewnętrznej (IMU – inertial measurement unit).
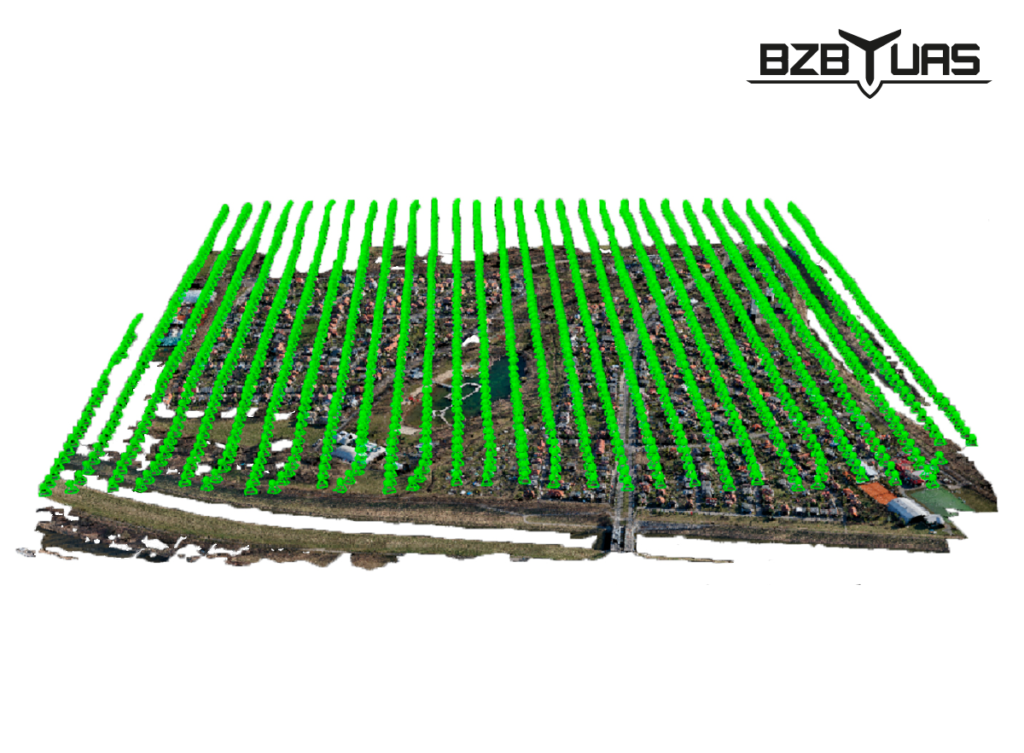
Chmura punktów
W kolejnym kroku, algorytm komputerowy dokonuje procesu zwanego matchingiem na podstawie danych GPS, elementów orientacji zewnętrznej oraz wewnętrznej (ogniskowej obiektywu, rozdzielczości matrycy, dystorsji fotografi). Polega on na znalezieniu punktów wspólnych, tzw. punktów wiążących (ang. tie points) i połączeniu ich między zdjęciami.
Aerotriangulacja
Następnie kolejny algorytm iteracyjny aerotriangulacji, łączy zbiór zdjęć w sieć geometryczną. Wykorzystuje do tego połączone zdjęcia oraz informacje o autokalibracji kamery oraz fotopunkty do zorientowania całości w znanym układzie współrzędnych wykorzystując dane GPS.
Na tej podstawie tworzony jest NMPT – numeryczny model pokrycia terenu.
Ortorektyfikacja
Numeryczny model terenu NMT (czy w wypadku zdjęć z infrastrukturą i roślinnością, NMPT) to jeszcze nie ortofotomapa. Ostatnim etapem jest nałożenie zdjęć na otrzymany wcześniej cyfrowy model terenu (czyli właśnie zmiana rzutu środkowego na ortogonalny, prostopadły) oraz mozaikowanie (czyli połączenie wielu fragmentów mapy w całość).
Zalety ortofotomap wykonanych z bezzałogowców (UAS/UAV)
Wierna ortofotomapa
Jednym z parametrów nalotu fotogrametrycznego dronem jest gęstość pokrycie (podłużne i poprzeczne). W praktyce oznacza to, jak duża część dwóch kolejnych zdjęć jest wspólna. Im pokrycie jest większe, tym gęściej wykonywane są zdjęcia.
Przy pokryciu rzędu 80% można uzyskać wierną ortofotomapę (true orthophoto), na której nie występuje przekłamanie perspektywy obiektów wysokich i zasłonięcie części terenu. Obiekty zrzutowane są prostopadle na swoje podstawy.
Lepsze niż zdjęcia z satelity
Drony wykonują zdjęcia z pułapu rzędu 50-500 metrów nad ziemią. Dodatkowo, naloty planowane są względem prognozy pogody. W ten sposób można uniknąć zachmurzenia i mgły na zdjęciach, a wysoka wilgotność powietrza na takim dystansie nie zaburza barw. Zdjęcia z drona charakteryzują się żywymi, dobrze odwzorowanymi kolorami.
Koszt wykonania takiej mapy jest również relatywnie niski, a wyniki można otrzymać w 24 godziny.
Mobilność
Wysoka mobilność dronów pozwala przeprowadzić naloty niemalże wszędzie i zawsze. Głównymi ograniczeniami są jedynie warunki pogodowe (prędkość wiatru, opady), możliwe miejsca startu i lądowania oraz strefy zakazu lotów.
Praca w trudnych warunkach
Drony dopuszczają także możliwość pracy w trudnym lub nieosiągalnym dla geodety terenie. Na przykład nad kopalniami odkrywkowymi, placem budowy, lub terenem skalistym czy bagnistym. W przypadku nalotów i mapowania terenów budowy, nie ma konieczności przerwy w pracach.
Chcesz wykonać cyfrową ortofotomapę?
Dokonaj pomiarów i zaplanuj wykorzystanie terenu. Zamów ortofotomapę od BZB UAS

